- Published on
Working with Raspberry Pi and Ultrasonic Sensor
- Authors

- Name
- UjjwalBgn
Connections
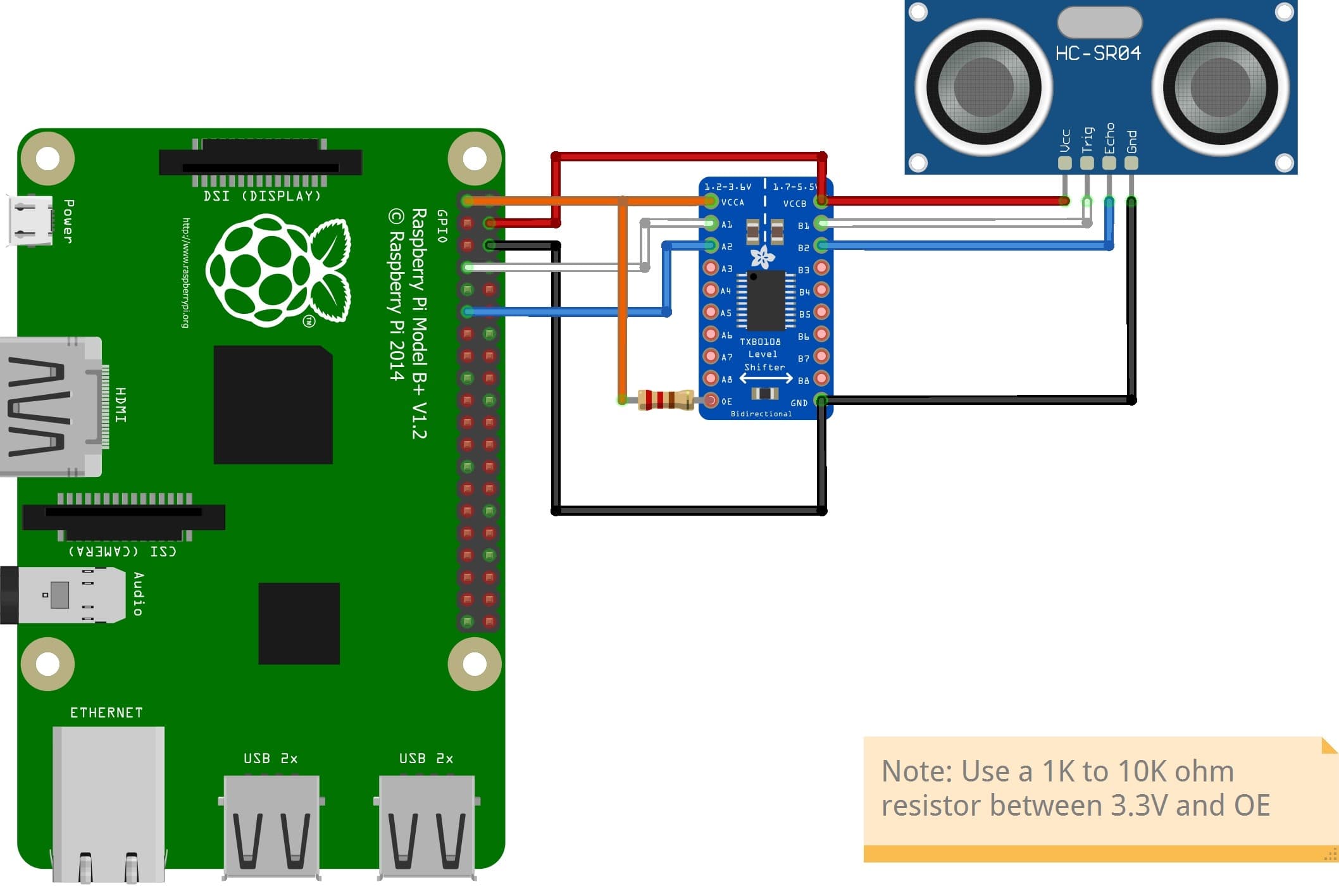
Using 8-Channel Bi-Directional Logic Level Converter (TXB0108)
The below diagram shows the conncections required for connecting Pi to Ultrasonic Sensor (HC-SR04) using a 8-Channel Bi-Directional Logic Level Converter (TXB0108)
Using Resistors in Parallel
Using two 10K Ohm resistors in parallel to reduces their total resistance to 5K Ohm.
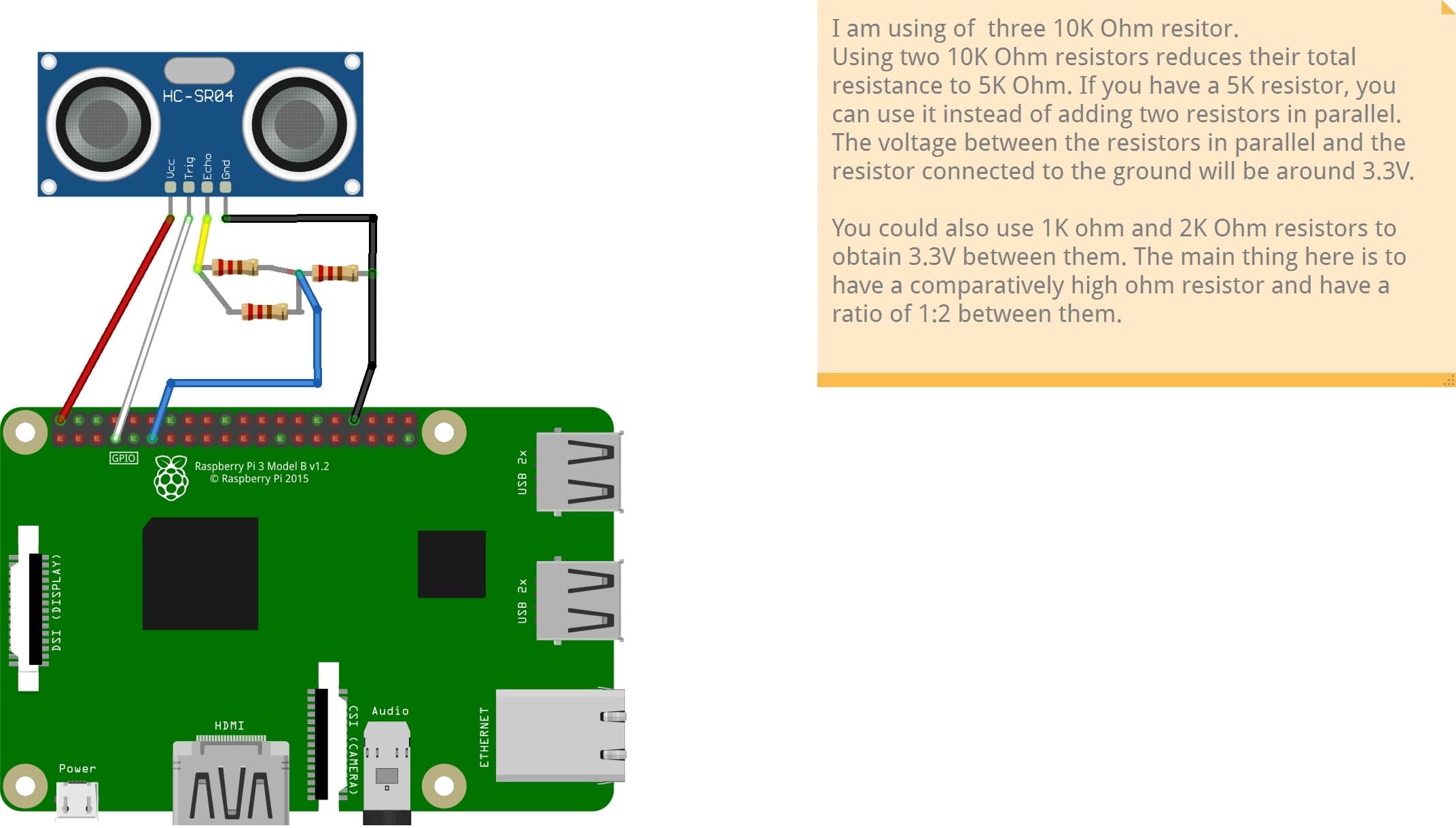
Note: You could also use 1K ohm and 2K Ohm resistors to obtain 3.3V between them. The main thing here is to have a comparatively high ohm resistor and have a ratio of 1:2 between them.
Code
Here is a sample code for working with Ultrasonic Sensor:
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
# Define GPIO to use on Pi
GPIO_TRIGGER = 4
GPIO_ECHO = 17
# Set pins as output and input
GPIO.setup(GPIO_TRIGGER,GPIO.OUT)
GPIO.setup(GPIO_ECHO,GPIO.IN)
# Set trigger to False (Low)
GPIO.output(GPIO_TRIGGER, False)
time.sleep(0.1)
# Measurement Function
def measureDistance():
GPIO.output(GPIO_TRIGGER, True)
# Let the trigger be on for 10us
time.sleep(0.000001)
GPIO.output(GPIO_TRIGGER, False)
while GPIO.input(GPIO_ECHO)==0:
start = time.time()
while GPIO.input(GPIO_ECHO)==1:
stop = time.time()
time_diff = stop-start
# 34600 cm/s is the speed of sound at 25 Deg C (77F).
distance = (time_diff * 34600 )/2
return distance
try:
while True:
distance = measureDistance()
print("Distance : {0:.2f} cm".format(distance))
# wait for half second
time.sleep(.5)
except KeyboardInterrupt:
# User pressed CTRL-C
# Reset GPIO settings
GPIO.cleanup()